Nuovo Ricevitore Satellitare in casa Professione3D

Eseguire i rilievi satellitari con un sistema Base – Rover
Un sistema base rover RTK (Real-Time Kinematic) è costituito da due principali componenti: una stazione base e un rover. Questi dispositivi sfruttano segnali dai satelliti per ottenere una posizione accurata in tempo reale.
1. Stazione Base:
La stazione base è posizionata in un luogo con coordinate conosciute, ovvero precedentemente rilevate sfruttando una connessione dati e appoggiandosi ad una rete di stazioni permanenti (es. Hexagon Smartnet). Si utilizza uno dei due ricevitori GNSS impostato come base per ricevere segnali da satelliti e calcolare la sua posizione esatta. Successivamente, trasmette correzioni di differenza ai rover nelle vicinanze tramite la radio UHF interna.
2. Rover:
Il rover è il secondo ricevitore GNSS che riceve i segnali dalla stazione base e calcola la propria posizione in base alle correzioni ricevute. Integrando queste correzioni con i segnali satellitari, il rover può determinare la sua posizione con una precisione elevata, nell’ordine dei centimetri.

Funzionamento:
Il sistema RTK utilizza la fase del segnale dei satelliti per calcolare posizioni estremamente accurate. La stazione base e il rover seguono una procedura di correzione differenziale. La stazione base conosce la sua posizione esatta mentre il rover la cerca. Quando il rover riceve i segnali dalla stazione base, calcola la differenza tra la posizione stimata e quella nota della stazione base. Questa correzione differenziale è inviata al rover in tempo reale.
Video del Sistema Base Rover RTK:
Nel video, puoi vedere l’applicazione pratica del un sistema base rover RTK. La stazione base è fissa sul punto noto (sulla destra) mentre il rover è sulla sinistra. Entrambi sono in comunicazione attraverso una trasmissione radio delle correzioni.
Il Drone (Autel Evo II Pro RTK) è anch’esso collegato alla stessa base e riceve le correzioni differenziali via NTRIP Host.
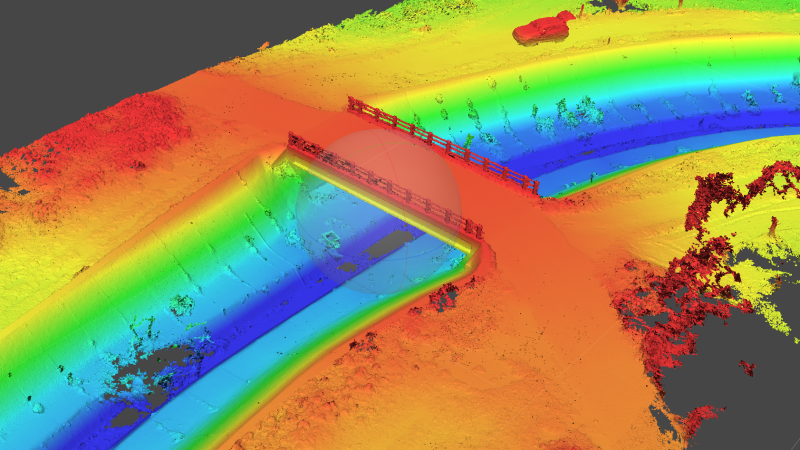
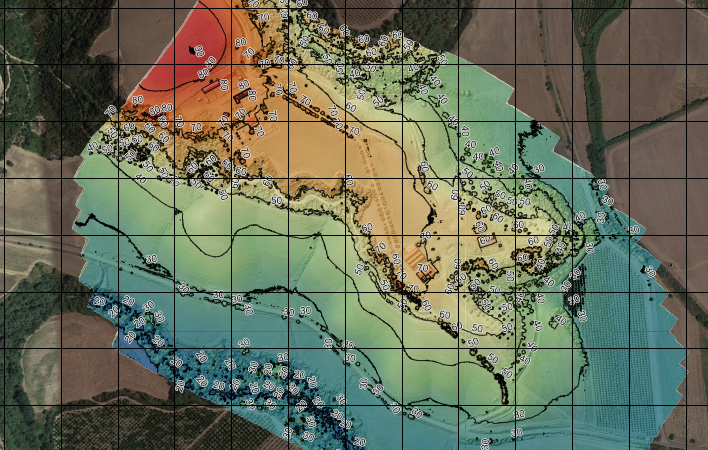
Questo sistema consente di effettuare il rilievo topografico e fotogrammetrico condividendo la base, il che comporta un significativo incremento della precisione delle misure.